|
Hallo 🙂
Das Problem liegt sehr wahrscheinlich an der Kombination aus enger Durchfahrt und Hecke als Hindernis.
Die Sensoren erkennen die Äste seitlich als Hindernis. Dadurch korrigiert der Roboter ständig oder traut sich gar nicht richtig durch, deshalb funktioniert es mal und mal nicht.
Was du versuchen kannst:
👉 Hinderniserkennung auf 5 cm stellen
→ Dann ist er weniger empfindlich und fährt eher durch
👉 Abstand zu Hindernissen auf 10cm einstellen
Zusätzlich sinnvoll:
- Hecke innen etwas zurückschneiden (ein paar cm helfen schon)
- Durchgang möglichst gerade und frei halten
- Übergang in der Karte **so breit wie möglich einzeichnen
Wenn es nicht hilft, bleibt langfristig nur, etwas mehr Platz zu schaffen 👍
|  631
631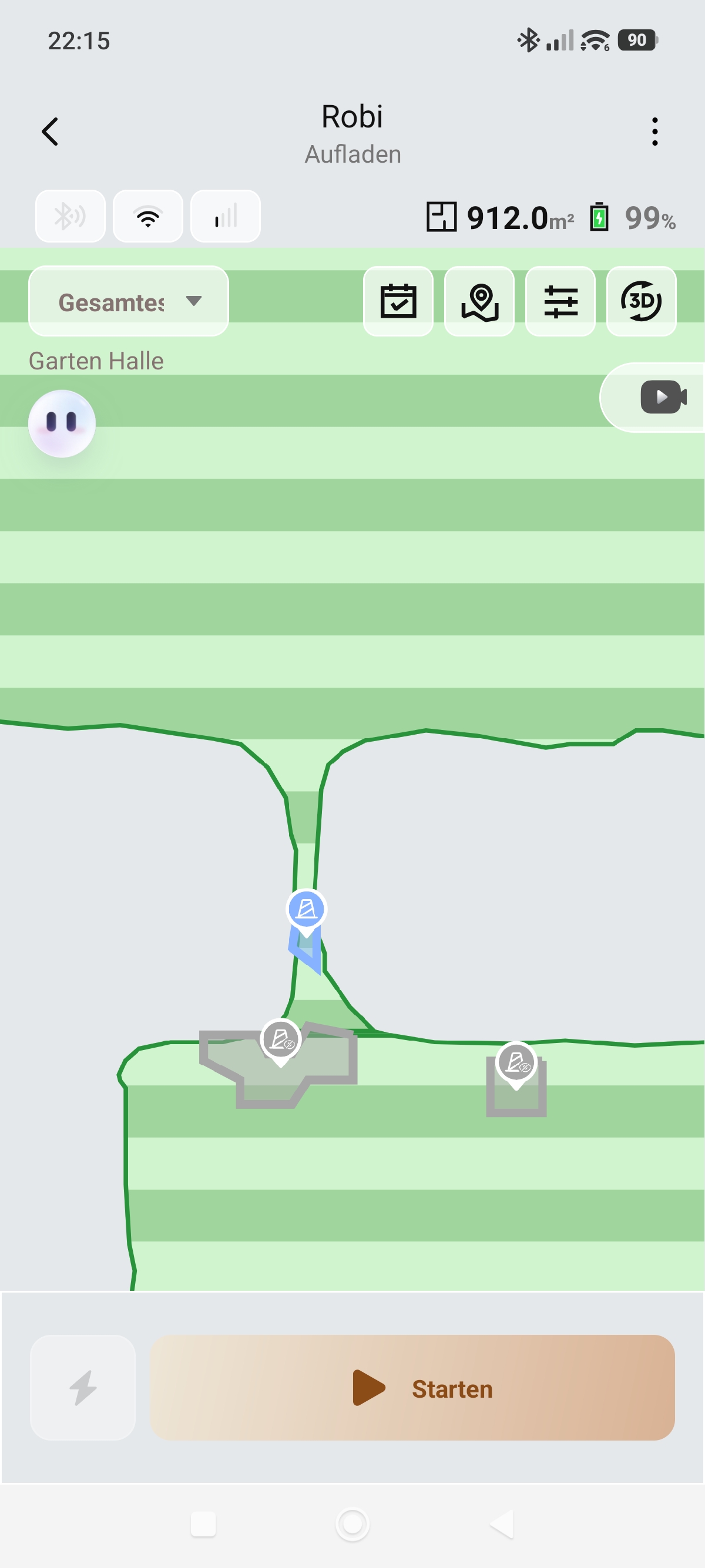


 DE
DE